






Exploring Open Innovation
One of our open innovation projects focused on creating a fully autonomous drone platform using open-source hardware and software.
We aimed to explore how open-source technologies, combined with 3D printing and innovative materials, could deliver a reliable, fully autonomous drone. The goal was to establish a platform for experimentation, functionality, and discovery.
The drone was developed through an iterative, scrum-based process:
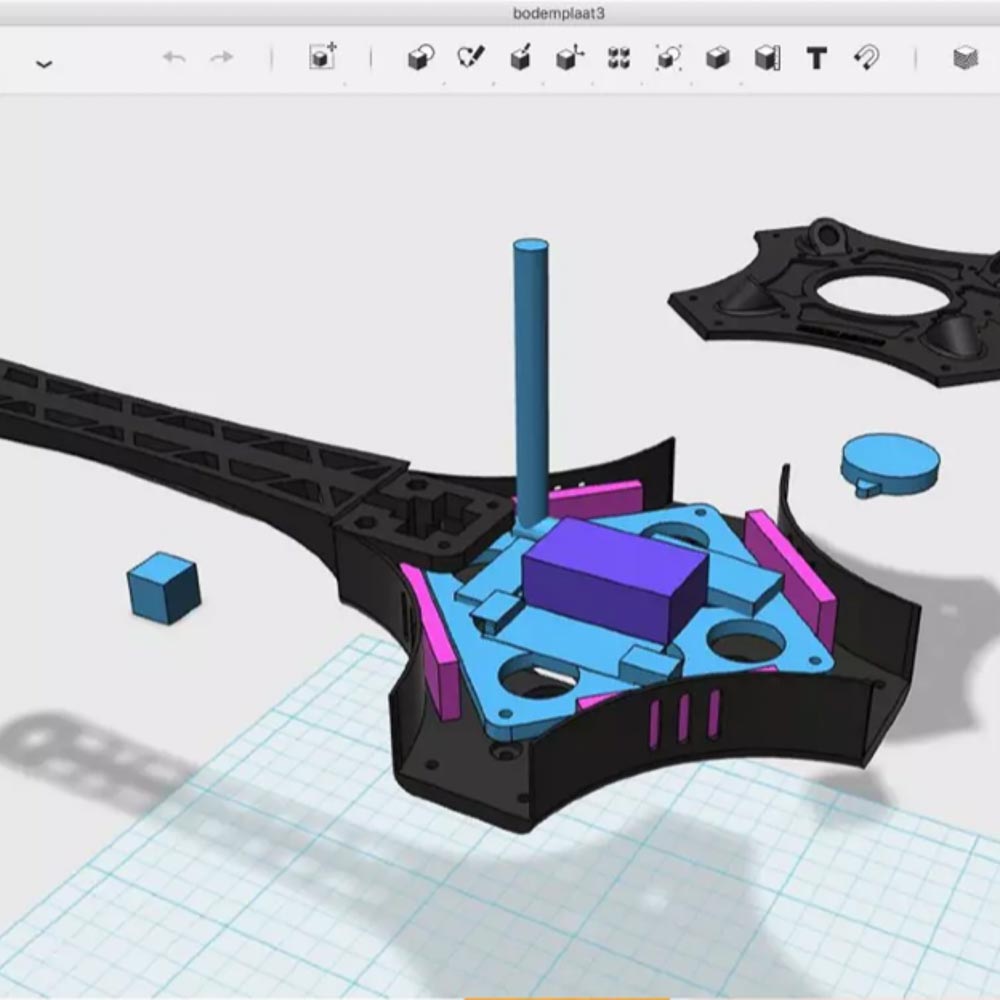
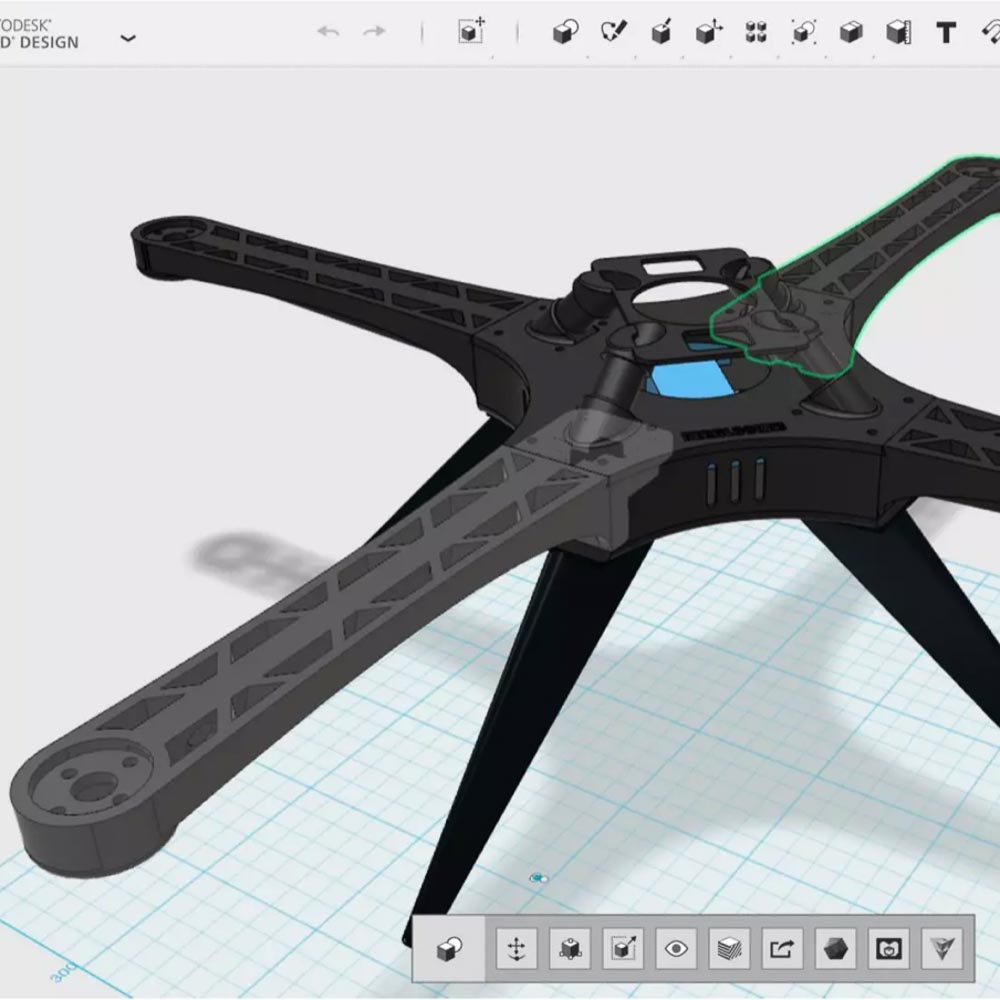
- Prototyping: Components were carefully designed, 3D-printed, and rigorously tested for performance and durability.
- Material Innovation: ABS with fiber enhancements provided a lightweight yet robust structure for real-world applications.
- Open-Source Hardware: Built on the Pixhawk CPU, a versatile, open-source flight controller.
- Open-Source Software: Powered by ArduPilot, enabling fully autonomous flight capabilities.
The final drone platform:
- Achieved full autonomy using ArduPilot’s advanced control algorithms.
- Adapted to diverse applications, from research to experimental testing.
- Was efficiently manufactured via 3D printing, allowing for rapid iteration and customization.
This project highlighted the transformative potential of open innovation. By combining open-source tools with design thinking, we were able to:
- Streamline development timelines and reduce costs.
- Promote collaboration and knowledge sharing.
- Build a foundation for ongoing experimentation and innovation.
Though conducted as a one-time research initiative, this project illustrates the broader potential of open-source technologies in design and manufacturing. The insights gained inspire future exploration in fields like mobility, robotics, and beyond.
Curious about our approach to open innovation or how we bring bold ideas to life? Contact us to learn more.